
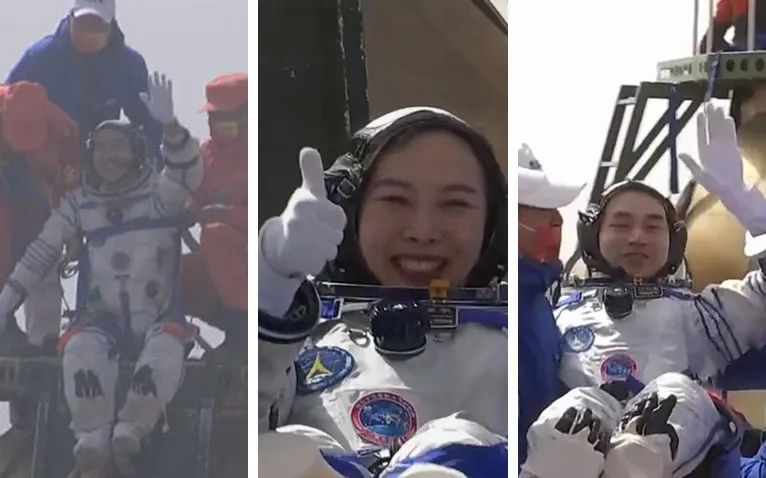
2022年4月16日09時56分,神舟十三號載人飛船返回艙在東風著陸場預定區域安全著陸,11時05分,航天員翟志剛、王亞平、葉光富全部安全出艙,感覺非常良好!飛行乘組在空間站組合體工作生活了183天,創下了中國航天員連續在軌飛行時長新紀錄!神舟十三號載人飛行任務取得圓滿成功!神舟十三號載人飛行任務的圓滿成功,標志著空間站關鍵技術驗證階段任務圓滿完成,中國空間站即將進入建造階段。

此次任務中,中國航天科工自主研制生產的多項技術產品為神舟十三號航天員乘組順利返回提供了全程保障。
“剛柔并濟”護神舟
自1999年以來,每一次神舟飛船執行任務,從未缺少中國航天科工三院111廠研制的連接分離機構的陪伴,它猶如飛船收放自如的臂膀,在飛行器從起飛、入軌、對接和返回過程中,有力連接、及時分離各個艙段,“剛柔并濟”護佑神舟平安。
“升空時連接要堅強有力,分開時要干凈利落”,這是連接分離機構的顯著特點,更事關任務成敗。連接分離機構主要包括火工鎖和彈簧分離推桿,它們在神舟飛船上,如“臂膀”一樣連接著三個艙段,主要位于飛船軌道艙和返回艙之間、返回艙和推進艙之間、返回艙防熱大底和艙體之間。
在飛船發射階段,“堅強有力”是對飛行器連接分離機構的首要要求。從飛船發射階段到實施交會對接過程中,連接機構就開啟了“剛性模式”,克服空中氣流等外力因素的影響,避免出現任何松動引起飛船在空中解體的現象,保障了飛船各艙段安全有效連接。
在飛船返回的過程中,各個艙段之間的連接分離機構必須確保精準無誤的工作。首先,軌道艙的火工鎖及時打開,讓推進艙和返回艙組合體踏上回家之路。當推進艙助推返回艙重返大氣層內,在預定時間要及時推掉推進艙,讓返回艙飛向著陸場;當返回艙接近著陸場時,艙底端用于防御吸收大氣層摩擦熱量的防熱大底已圓滿結束使命,需要由拋底火工鎖執行拋底任務,進而確保返回艙安全著陸。拋底鎖的動作關系到防熱大底能否按時拋掉,是返回時保障航天員生命安全的重要程序。
雷達“標尺”護航平穩飛行

在神舟十三號載人飛行任務中,由中國航天科工二院23所研制的兩部測量雷達全程保障,從神舟十三號返回器進入大氣層就開始進行跟蹤測量,如同一把“標尺”測量實時準確數據提供指控中心,并為前方搜救提供有效目標落點數據,護航返回器平安落地。
兩部雷達主要用于完成各類返回器的跟蹤測量任務,一部測量雷達的核心任務是承擔返回器在黑障區內的跟蹤測量,另一部測量雷達的核心任務是進行返回器在開傘至落地過程的跟蹤測量。
返回器進入大氣層時,與其周圍空氣激烈摩擦,會形成一個高溫高壓的電離氣體層,這個氣體層像劍鞘一樣包裹在返回器表面,隔絕返回器與地面測控站之間的通信聯絡,形成一個黑障區。這種危險的現象,會使返回器偏離預定的著陸區域,延誤對返回器的及時搜索和救援,嚴重時還會危及飛行安全,甚至可能危及航天員的生命。
為解決黑障區的跟蹤測量問題,23所自主研制了一部相控陣體制的測量雷達。該雷達吸收了曾十一次成功保障神舟飛船返回的回收一號雷達的任務經驗,優化了產品設計,在任務保障預案、保障準備等方面有扎實的基礎儲備。
回收任務前,保障隊員通過仔細分析引導數據,與用戶進行充分溝通,并配合用戶針對返回任務中黑障區的跟蹤測量做好充分的預案,著重針對黑障區內返回器對雷達存在隱身現象做好充分準備,為返回器回家之途保駕護航。
另一部雷達是回收任務最末端的跟蹤測量雷達,它從返回器開傘后開始對目標進行測量。
返回器進入返回軌道末端,利用著陸系統或滑翔飛行使返回艙軟著陸的航行軌道,稱為著陸段。在此階段,降落傘對返回器的著陸安全有重要作用,但降落傘受風的影響比較大,這一階段一般雷達無法精確測量,而光學設備受天氣、光線影響,無法開展全天時全天候的探測。
該雷達通過無源定位體制實現對返回器從開傘后至落地階段的高精度定位,全天時全天候工作且無人值守,為落點預報和返回器搜救提供及時準確的數據信息,站好回收任務的最后一班崗。
智慧“剎車”提供精度保障

在神舟十三號飛船返回著陸的最后幾米,位于返回艙底部的“伽馬剎車指令員”正沉著地測算著返回艙的速度和距地面高度信息。在飛船返回艙降落至預定高度時,準確發出了反推發動機點火指令,使返回艙在反推力的作用下平穩著陸,保障航天員安全舒適回家。
由中國航天科工三院35所研制的“伽馬剎車指令員”是飛船的關鍵設備,已先后服役于神舟八號至神舟十二號飛船,確保了歷次任務成功。
伽馬射線的探測體制賦予它穿透地表植被的能力,能精確測量返回艙底部距離地表的高度,精度達厘米級。通過向地表發射伽馬射線、快速捕獲反射回的射線,在指令員的“大腦”中進行精確計算,實時提取出高度和速度信息,在最佳時機發出反推點火指令,實現“高速度下高點火高度,低速度下低點火高度”的最優點火律,最大限度發揮反推發動機的緩沖性能。
“與行車原理一致,不同的速度、不同的剎車距離,都影響著乘坐者的感覺體驗。”技術負責人王征介紹到。
為了給航天員提供最優的著陸體驗,在速度自適應匹配高度控制方面,研制團隊做了充分仿真與試驗,對歷次飛行數據進行再分析、再確認,量身定制調校數據,確保核心控制精準到位,讓航天員乘組放心使用。
搜救“密網”護佑平安歸家
由中國航天科工二院706所自主研制的搜救信息系統全程參與神舟十三號載人飛行任務,為護佑航天員平安歸家編織了一幅嚴謹的搜救“密網”。
“快速返回方案”是之前從未嘗試過的飛船返回技術。包括神舟十二號在內的我國所有的載人飛船在返回的時候,都需要在載人飛船和空間站艙段分離后圍繞空間站進行繞飛,有時還會進行對接驗證,然后伺機轉入返回軌道,返回艙軌道艙脫離,返回艙返回地面,這一過程需要多次調整姿態和減速動作,耗費的時間通常要一天,而飛船快速返回的方式將節省多個環節,和神舟十三號飛船剛使用的快速對接技術類似,只需要幾個小時就可以完成返回。
搜救信息系統具備搜救任務籌劃、搜救指揮調度和搜救態勢展示等功能,通過引進多源信號對航天器、回收場站、搜救力量等進行實時跟蹤,為航天員搜救任務全程的情況掌握與指揮調度提供服務,是空間站任務實現航天員救援保障關鍵系統,對空間站建設與運營具有重要支撐作用。
此外,在此次飛行任務中,二院203所研制的一系列優質晶體元器件,利用穩定的石英晶體的壓電效應和頻率特性,在太空惡劣的環境中保持穩定跳動,并產生準確平穩的頻率信號,成為地面指揮人員監測和衡量飛行狀態的重要參考指標,為確保航天員安全返回地球起到重要作用。二院25所自主研制的交會對接微波雷達也在此次任務中再次開機,精確輸出神舟十三號載人飛船與空間站核心艙相對距離、速度和角度等位置信息,保駕神舟十三號載人飛船的順利返回。